阈值处理
土豆 2022/11/12 openCV
# 思维导图
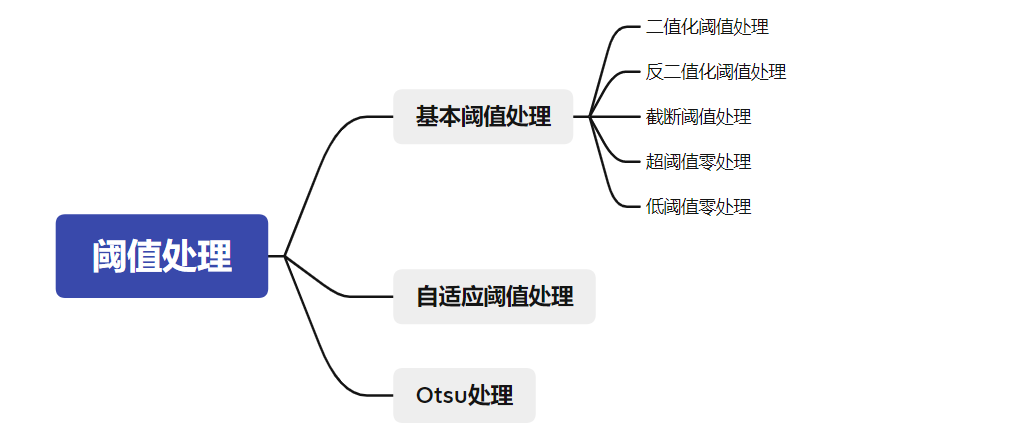
阈值处理是剔除图像内像素高于一定值或低于一定值的像素点。
阈值:中间的零界点
# threshold函数
阈值化处理函数
retval, dst = cv2.threshold( src,thresh, maxval, type)
- retval 返回的阈值
- dst 阈值处理后的结果图像
- src 原始图像
- thresh 要设定的阈值
- maxval 当type为THRESH_BINARY或者THRESH_BINARY_INV类型时,需要设定的最大值。
- type 阈值的分割类型
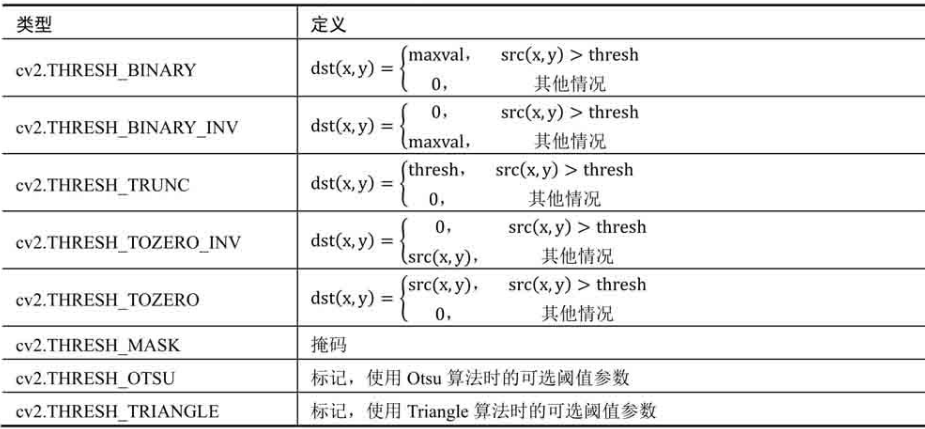
阈值分割可视化
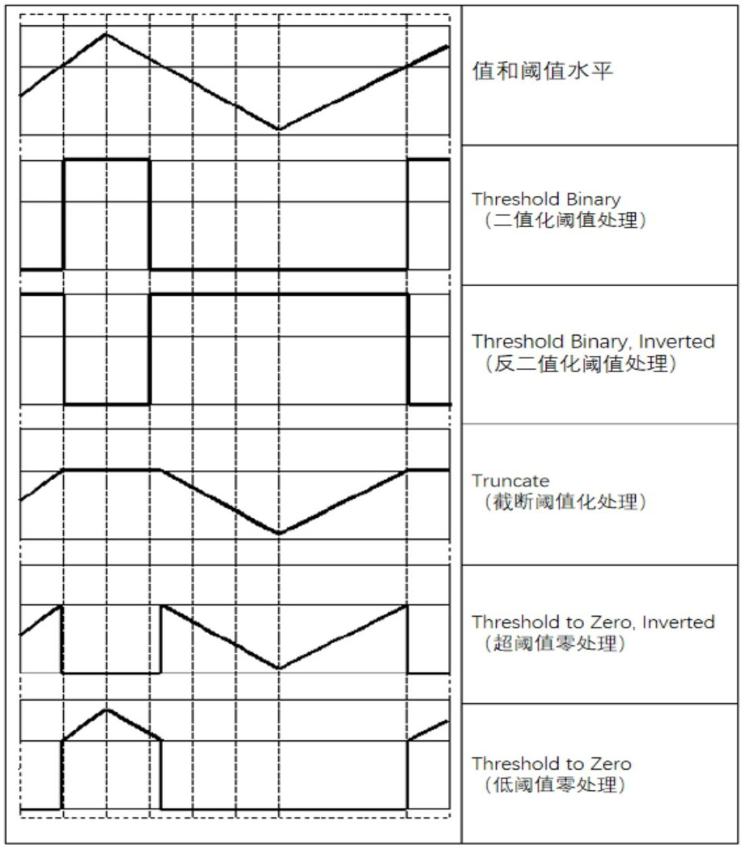
# 6.1.1 二值化阈值处理
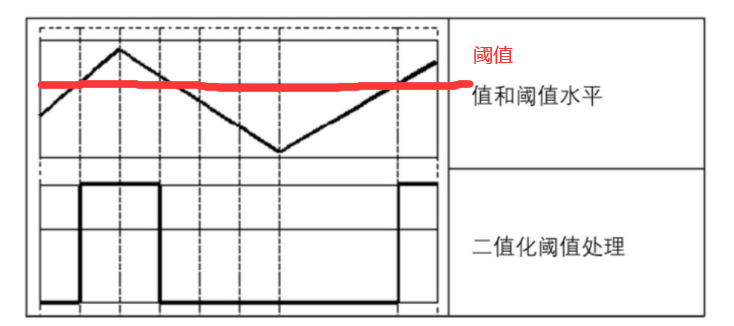
- 对于灰度值大于阈值thresh的像素点,将其灰度值设定为最大值。
- 对于灰度值小于或等于阈值thresh的像素点,将其灰度值设定为0。

假定阈值为127,大于127的像素点会被处理为255,其余值会被处理为0
示例
import cv2
import numpy as np
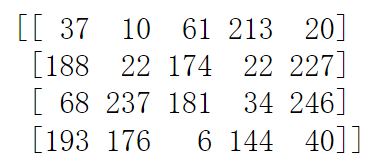
img = np.random.randint(0,256,size=[4,5],dtype=np.uint8)
# 阈值处理
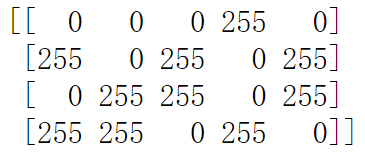
# 阈值127,超过127输出255,否则为0
t,rst=cv2.threshold(img,127,255,cv2.THRESH_BINARY)
print(img)
print(rst)
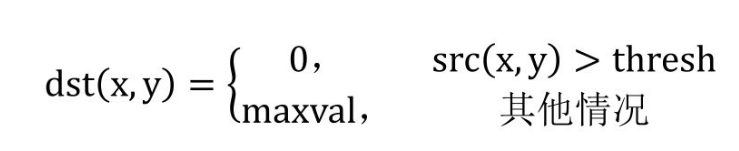
# 6.1.2 反二值化处理
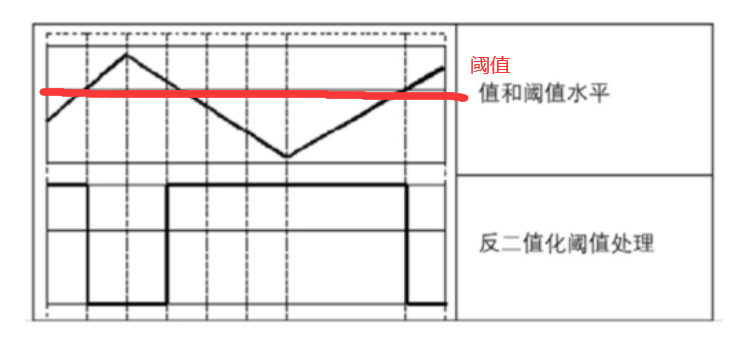
- 对于灰度值大于阈值的像素点,将其值设定为0
- 对于灰度值小于阈值的像素点,将其值设定为255
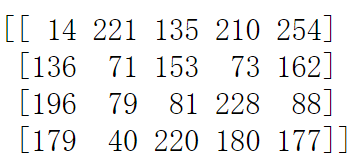
示例
import cv2
import numpy as np
img = np.random.randint(0,256,size=[4,5],dtype=np.uint8)
# 阈值处理
# 阈值127,超过127输出0
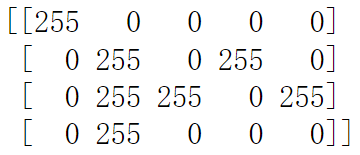
t,rst=cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
print(img)
print(rst)
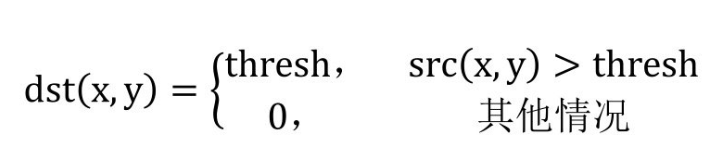
# 6.1.3 截断阈值化处理
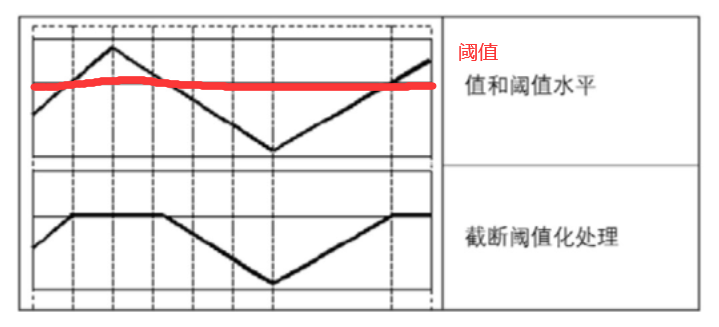
- 对于像素点大于127的像素点,其像素值设定为127
- 对于像素点小于127的像素点,其像素值保持不变
示例
import cv2
import numpy as np
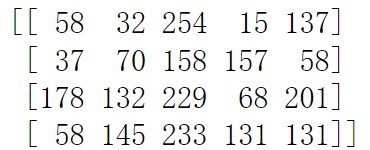
img = np.random.randint(0,256,size=[4,5],dtype=np.uint8)
# 阈值处理
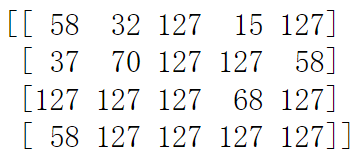
# 阈值127,超过127输出127,否则不变
t,rst=cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
print(img)
print(rst)
# 6.1.4 超阈值零处理
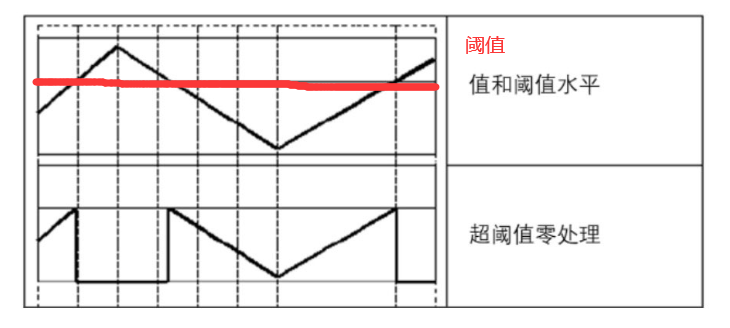
- 对于像素大于127的像素点,其值被设定为0
- 对于像素值小于127的像素点,其值保持不变

示例代码
import cv2
import numpy as np
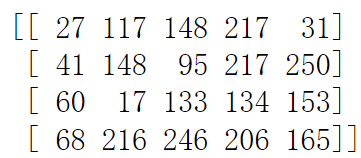
img = np.random.randint(0,256,size=[4,5],dtype=np.uint8)
# 阈值处理
# 阈值127,超过127输出0,否则不变
t,rst=cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
print(img)
print(rst)

# 6.1.5 低阈值零处理
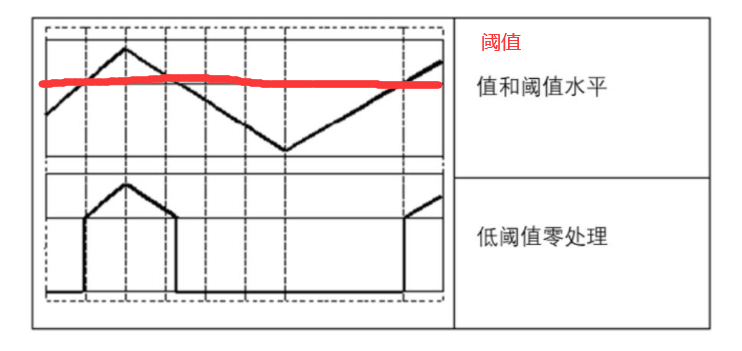
- 对于像素值大于127的像素点,其像素值将保持改变。
- 对于像素值小于或等于127的像素点,其像素值将被设定为0。

示例
import cv2
import numpy as np
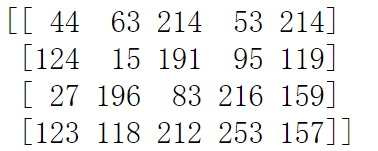
img = np.random.randint(0,256,size=[4,5],dtype=np.uint8)
# 阈值处理
# 阈值127,低于127输出0,否则不变
t,rst=cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
print(img)
print(rst)
# 自适应阈值处理
自适应阈值处理的方式通过计算每个像素点周围临近区域的加权平均值获得阈值
dst = cv.adaptiveThreshold(src,maxValue,adaptiveMethod,thresholdType,blockSize,C)
- dst 处理结果
- src 原始图像
- maxValue 最大值
- adaptiveMethod 代表适应的方法
- thresholdType 代表阈值处理方式,值必须是THRESH_BINARY或者THRESH_BINARY_INV中的一个
- blockSize代表块大小,通常为3 5 7 等
- C 是常量
adaptiveMethod 阈值计算方法
- ADAPTIVE_THRESH_MEAN_C 临近所有像素点的权重值是一致的
- ADAPTIVE_THRESH_GRUS_SIAN_C 临域各个像素点到中心的距离有关,通过高斯方程得到各个点的权重值。
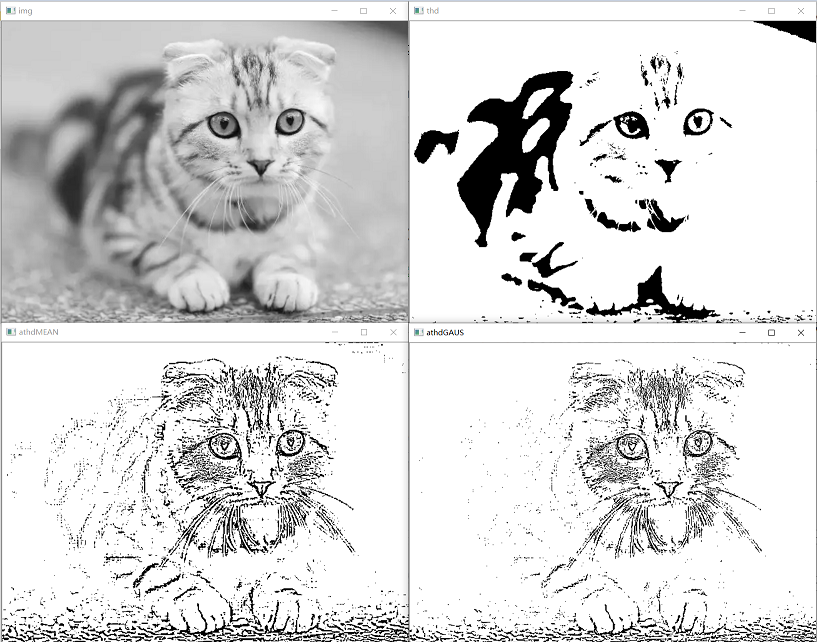
示例代码
import cv2
import numpy as np
img = cv2.imread("cat.jpg",0)
# 二值化域
t1,thd = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
# 临近权重一致
athdMEAN=cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,5,3)
# 高斯方程权重值
athdGAUS=cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY,5,3)
cv2.imshow("img",img)
cv2.imshow("thd",thd)
cv2.imshow("athdMEAN",athdMEAN)
cv2.imshow("athdGAUS",athdGAUS)
cv2.waitKey(0)
cv2.destroyAllWindows()
效果
# Otsu 处理
通常情况下处理的图像都是色彩均衡的,这时直接将阈值设为127是比较合适的。
但是,有时图像灰度级的分布时不均衡的,如果此时还将阈值设置为127,那么阈值处理的结果就是失败的。
注意:在使用Otsu方法时,要把阈值设为0.
t,otsu = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
- 参数type 增加一个参数值cv2.THRESH_OTSU
- 设定的阈值为0
- 返回值t是Otsu方法计算得到使用的最优阈值。
示例
import cv2
import numpy as np
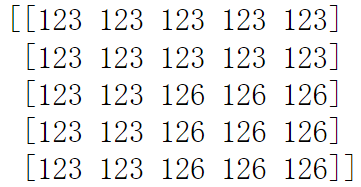
img = np.zeros((5,5),dtype=np.uint8)
img[0:6,0:6]=123
img[2:6,2:6]=126
# 二值处理
t1,thd = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
# otsu处理
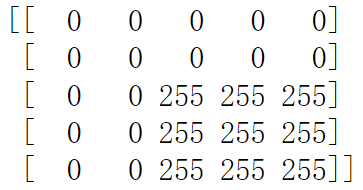
t2,otsu = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
print(img)
print(thd)
print(otsu)