图像平滑处理
# 思维导图
# 均值滤波
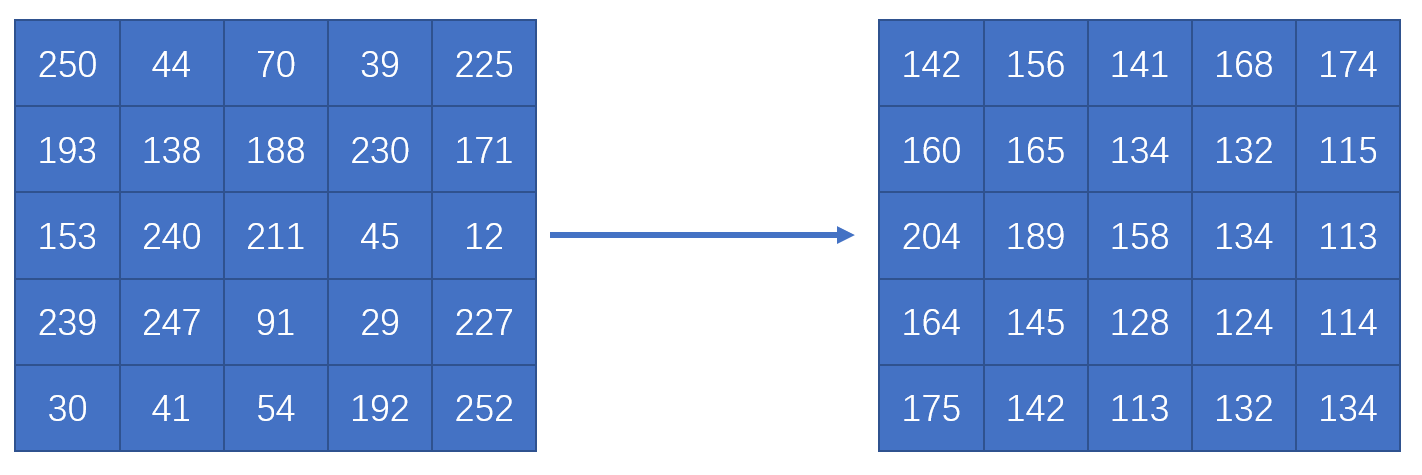
均值滤波是指用当前像素点周围N*N个像素值的均值来代替当前像素值。
取3X3区域内所有像素点平均值。
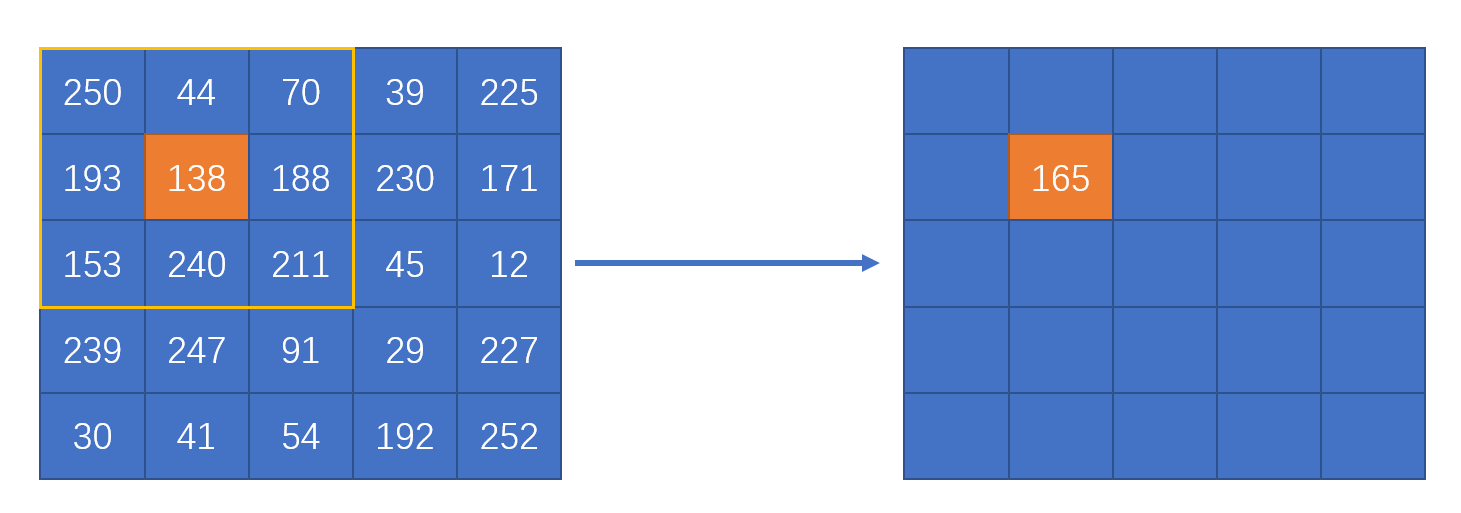
计算新值 [(250+44+70)+(193+138+188)+(153+240+211)] / 9 = 165.22
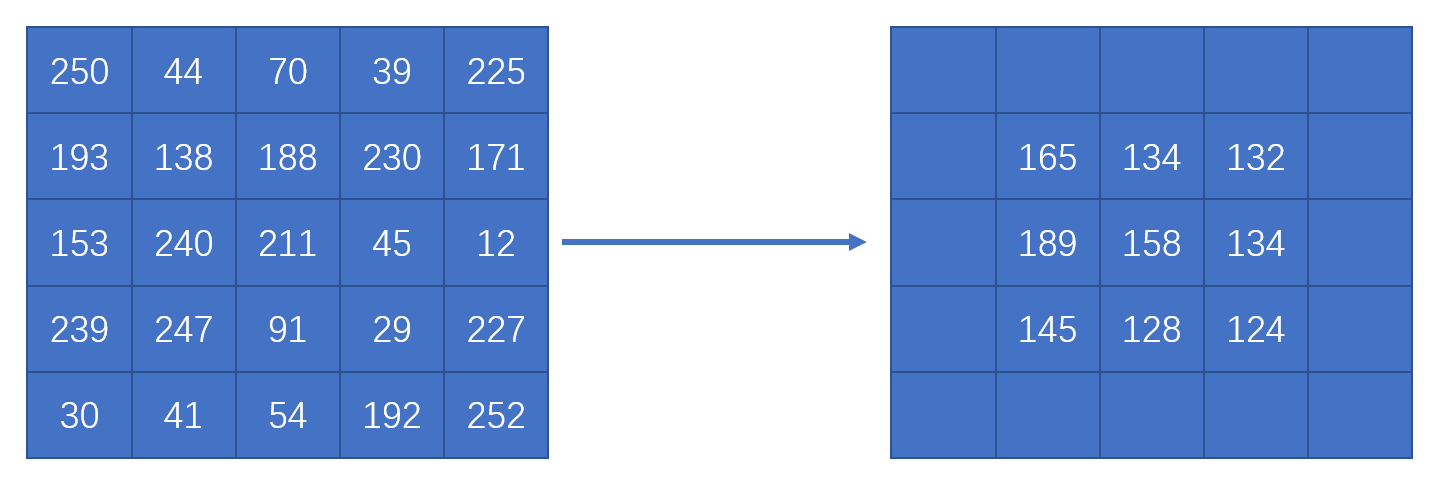
依次计算其他的值得到
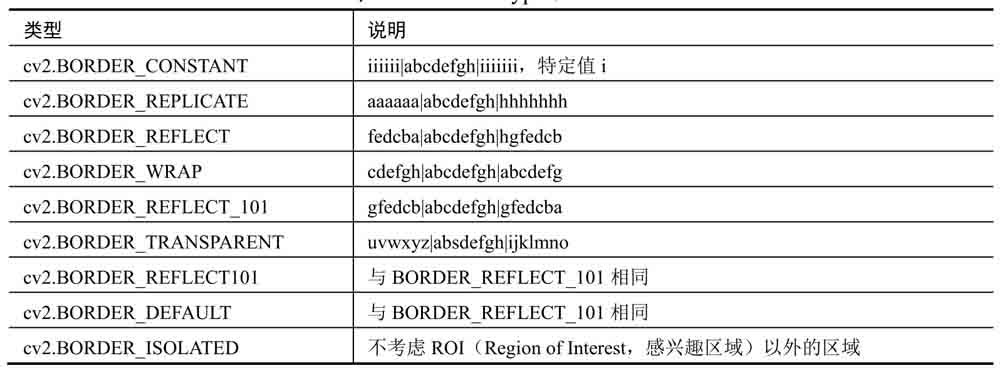
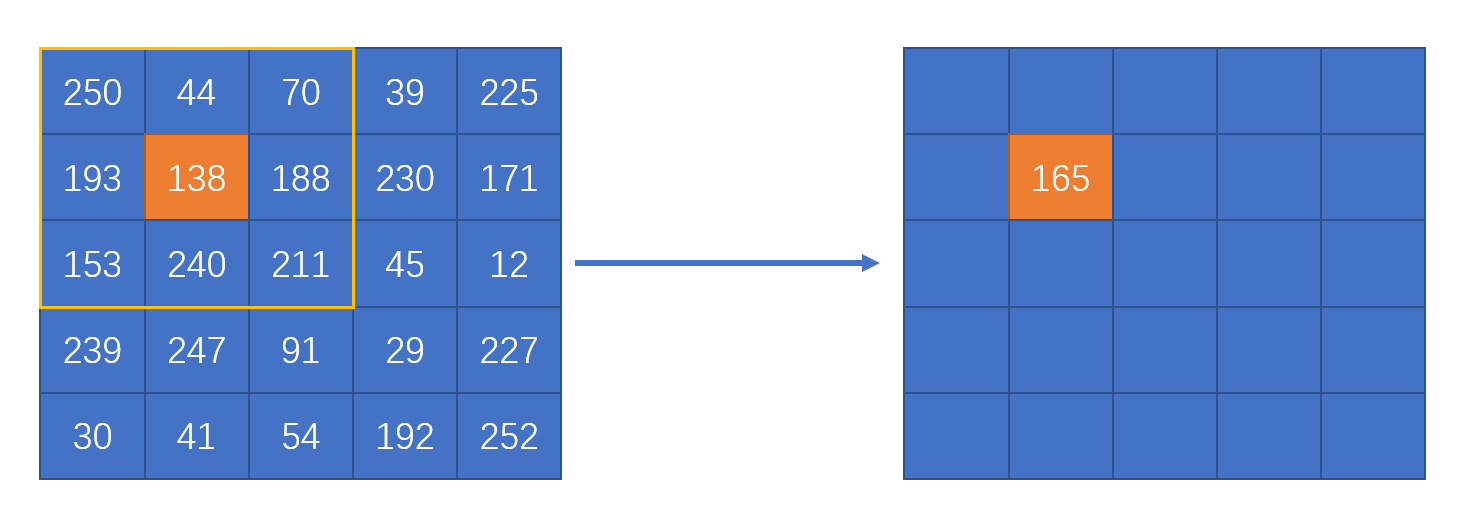
对于边缘的像素可以采用多种方式默认是BORDER_DEFAULT
对像素进行补齐,然后求值
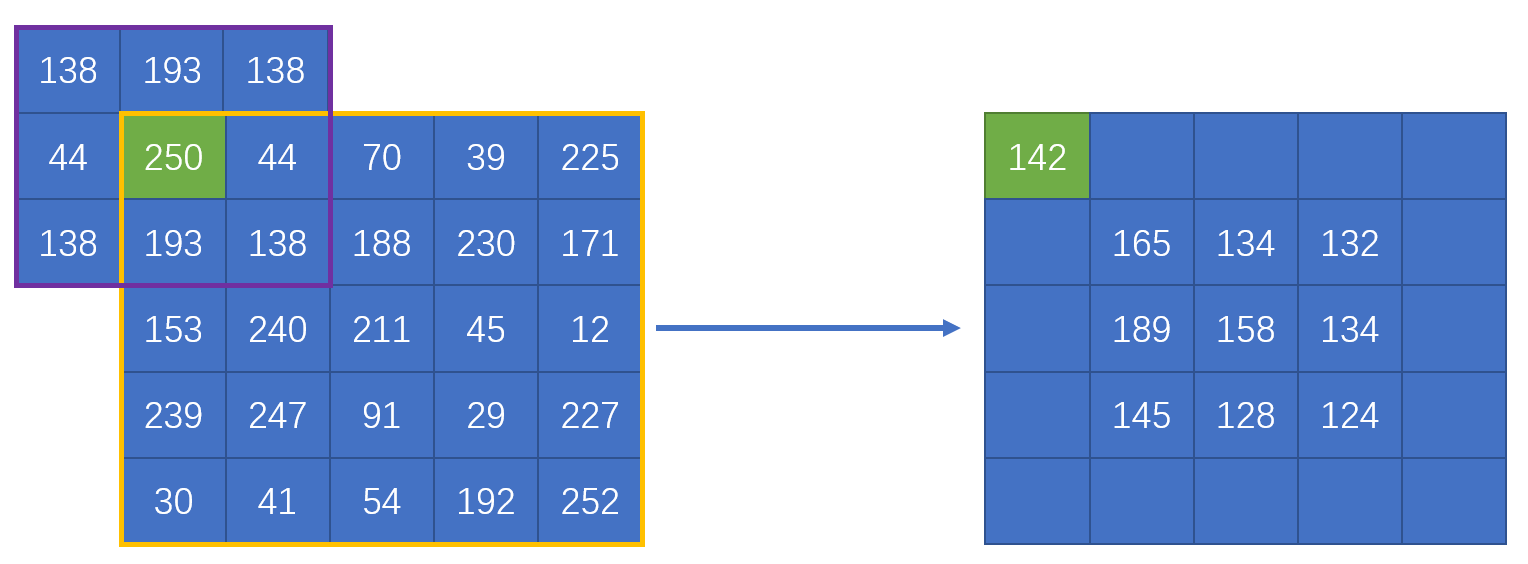
计算新值 [(138+193+138)+(44+250+44)+(138+193+138)]/9 = 141.77
依次计算其他的值得到
dst = cv2.blur(src,ksize,anchor,borderType)
- dst 返回值,均值滤波后的结果
- src 原始图像数据
- ksize 滤波核的大小
- anchor 锚点
- borderType 边界样式,决定了以何种方式处理边界
程序示例
import cv2
import numpy as np
o = np.random.randint(0,256,size=[5,5],dtype=np.uint8)
# 滤波后的值
r=cv2.blur(o,(3,3))
print(o)
print(r)
# 方框滤波
如果计算的是领域像素值的均值(相当于均值滤波,及归一化处理),如果是计算的是领域像素之和(及不归一化处理)
dst = cv2.boxFilter(src,ddepth,ksize,anchor,normalize,borderType)
- dst 返回值,方框滤波处理后的结果
- src 原始图像
- ddepth 图像深度,一般使用-1 表示与原图像使用相同的图像深度
- ksize 滤波核的大小
- anchor 锚点
- normalize 表示是否归一化(默认为1,及归一化)
7.2.1 归一化处理
对滤波核内的所有像素求平均值
示例
import cv2
import numpy as np
o = np.random.randint(0,256,size=[5,5],dtype=np.uint8)
# 方框滤波 归一化处理
r=cv2.boxFilter(o,-1,(3,3))
print(o)
print(r)
7.2.2 不归一化处理
对滤波核内的所有像素求和,大于255取255
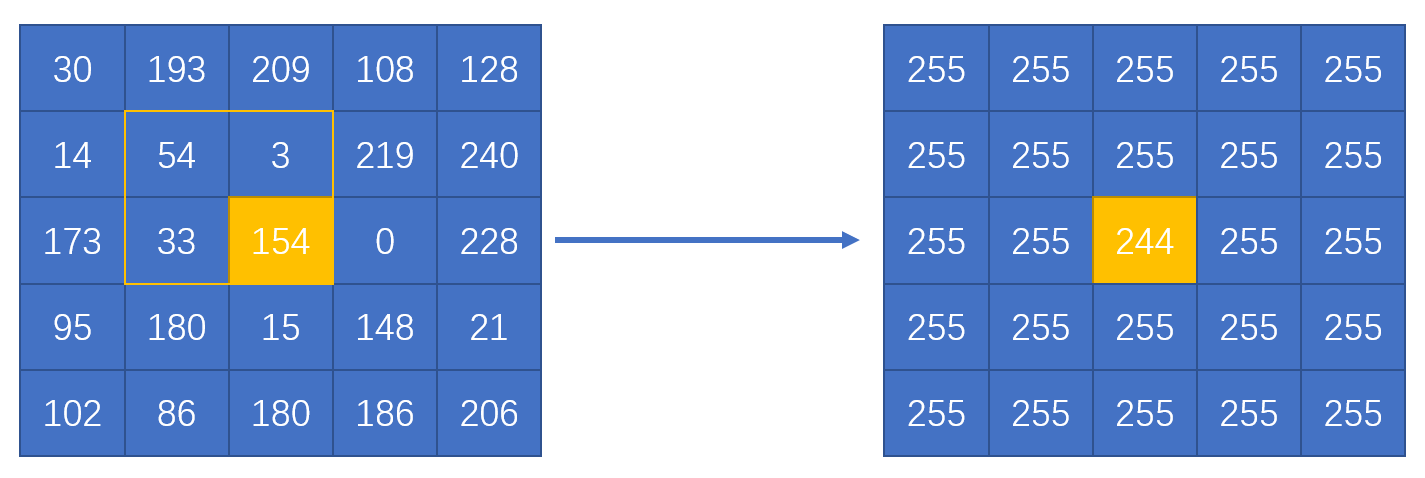
计算新值 [(54+3)+(33+154)] = 244
示例
import cv2
import numpy as np
o = np.random.randint(0,256,size=[5,5],dtype=np.uint8)
# 方框滤波 不使用归一化
r=cv2.boxFilter(o,-1,(3,3),normalize=0)
print(o)
print(r)
# 高斯滤波
在高斯滤波中,会将中心点的权重值加大,远离中心点的权重减少,在此基础上计算各个领域内各个像素值的和。
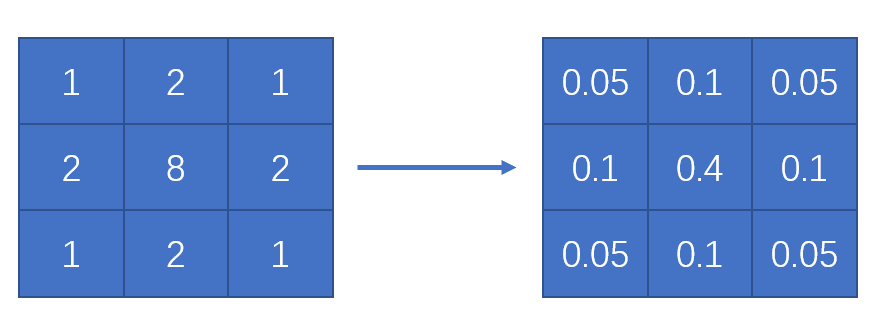
3X3的高斯滤波卷积核

算出每个值得比例
sum = 1 + 2 + 1 + 2 + 8 + 2 + 1 + 2 + 1 = 20
分别求值 1/20 = 0.05 2/20 = 0.1 8/20 = 0.4
实际运用
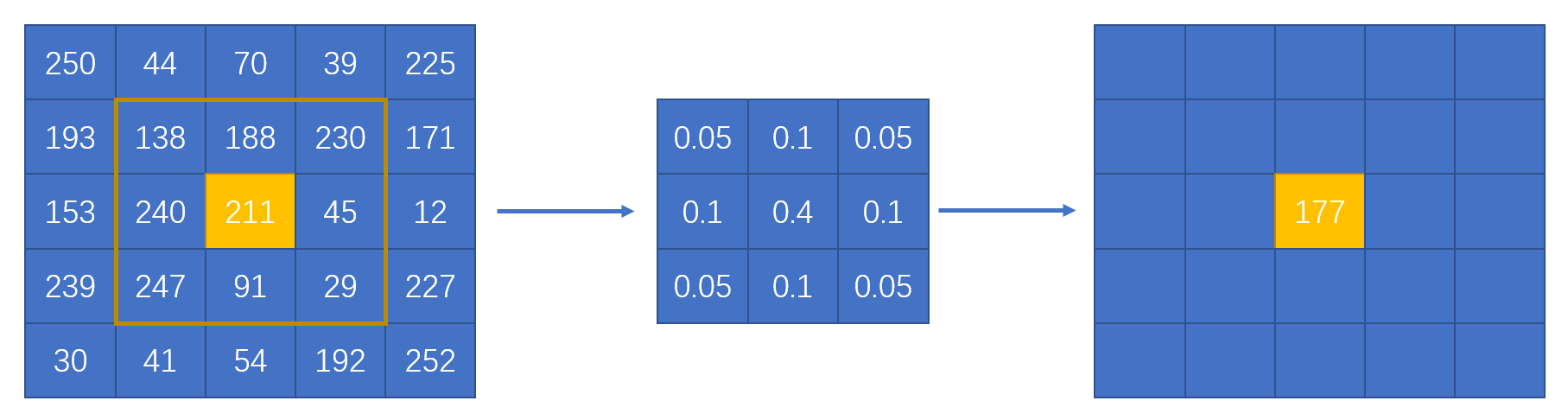
计算新值 [(138 x 0.05+188 x 0.1 + 230 x 0.05)+(240 x 0.1+211 x 0.4 + 45 x 0.1)+(247 x 0.05+91 x 0.1 + 29 x 0.05)] = 177
函数语法
dst = cv2.GaussianBlur(src,ksize,sigmaX,sigmaY,borderType)
- dst 返回值,高斯滤波处理后得值
- src 原始图像
- ksize 滤波核大小
- sigmaX 卷积核在水平方向上(X轴方向)得标准差,其控制得是权重比例。
- borderType 边界样式
示例
import cv2
import numpy as np
o = np.random.randint(0,256,size=[5,5],dtype=np.uint8)
# 高斯滤波
r=cv2.GaussianBlur(o,(3,3),0,0)
print(o)
print(r)
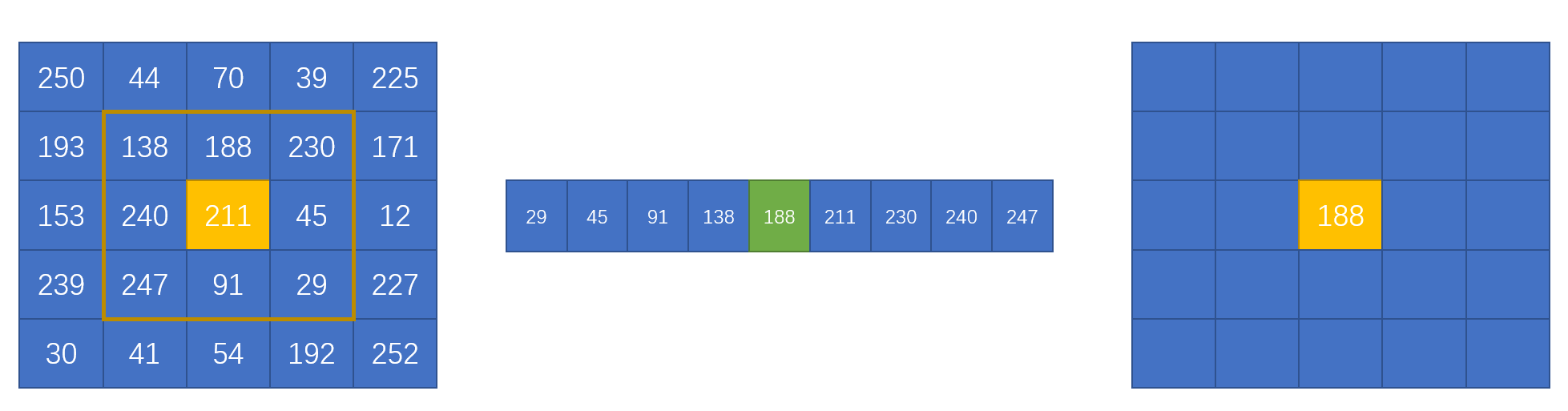
# 中值滤波
它用领域内所有像素值的中间值来替代当前像素点的像素值
函数语法
dst = cv2.medianBlur(src,ksize)
- dst 返回值,中值滤波处理的结果
- src 需要处理的图像
- ksize 滤波核的大小,核大小必须是比1大的奇数,如3,5,7
示例
import cv2
import numpy as np
o = np.random.randint(0,256,size=[5,5],dtype=np.uint8)
# 中值滤波
r=cv2.medianBlur(o,3)
print(o)
print(r)
# 双边滤波
双边滤波是综合考虑空间信息和色彩信息的滤波方式,在滤波过程中能够有效的保护图像内的边缘信息。
函数语法
dst = cv2.bilateralFilter(src,d,sigmaColor,sigmaSpace,borderType)
- dst 返回值,双边滤波后得到的处理结果
- src 原图像
- d 滤波时选取的空间距离参数
- sigmaColor是滤波处理时选取的颜色差值范围,该值决定了周围那些像素点能够参与到滤波中来。255时都能参与运算。
- sigmaSpace是坐标空间中的sigma值。它的值越大,说明有越多的点能够参与到滤波计算中来。
- borderType 边界样式
示例
import cv2
import numpy as np
o = np.random.randint(0,256,size=[5,5],dtype=np.uint8)
# 双边滤波
r=cv2.bilateralFilter(o,55,100,100)
print(o)
print(r)
# 2D卷积
我们希望使用特定的卷积核实现卷积操作
操作函数
dst = cv2.filter2D(src,ddepth,kernel,anchor,delta,borderType)
- dst 返回值
- src 原始图像
- ddeptch 处理结果图像的图像深度
- kernel 是卷积核
- anchor 锚点
- delta 修正值,它是可选项。如果该值存在,会在基础滤波的结果上加上该值作为最终滤波的结果
- borderType 边界样式
示例:
构建一个均值滤波卷积核
import cv2
import numpy as np
o = np.random.randint(0,256,size=[5,5],dtype=np.uint8)
# 卷积核
kernal = np.ones((9,9),np.float32)/81
# 2D卷积
r=cv2.filter2D(o,-1,kernal)
print(o)
print(r)